A Temporal Boosted YOLO-Based Model for Birds Detection around Wind Farms
Mid Sweden University
Holmgatan 10, 85170 Sundsvall, Sweden
Linköping University
58183 Linköping, Sweden
Faculty of Science
University of Ontario Institute of Technology
2000 Simcoe St. N., Oshawa ON L1G 0C5, Canada
Abstract
Object detection for sky surveillance is a challenging problem due to having small objects in a large volume and a constantly changing background which requires high resolution frames. For example, detecting flying birds in wind farms to prevent their collision with the wind turbines. This paper proposes a YOLOv4-based ensemble model for bird detection in grayscale videos captured around wind turbines in wind farms. In order to tackle this problem, we introduce two datasets—(1) Klim and (2) Skagen—collected at two locations in Denmark. We use Klim training set to train three increasingly capable YOLOv4 based models. Model 1 uses YOLOv4 trained on the Klim dataset, Model 2 introduces tiling to improve small bird detection, and the last model uses tiling and temporal stacking and achieves the best mAP values on both Klim and Skagen datasets. We used this model to set up an ensemble detector, which further improves mAP values on both datasets. The three models achieve testing mAP values of 82%, 88%, and 90% on the Klim dataset. mAP values for Model 1 and Model 3 on the Skagen dataset are 60% and 92%. Improving object detection accuracy could mitigate birds’ mortality rate by choosing the locations for such establishment and the turbines location. It can also be used to improve the collision avoidance systems used in wind energy facilities.
Synopsis
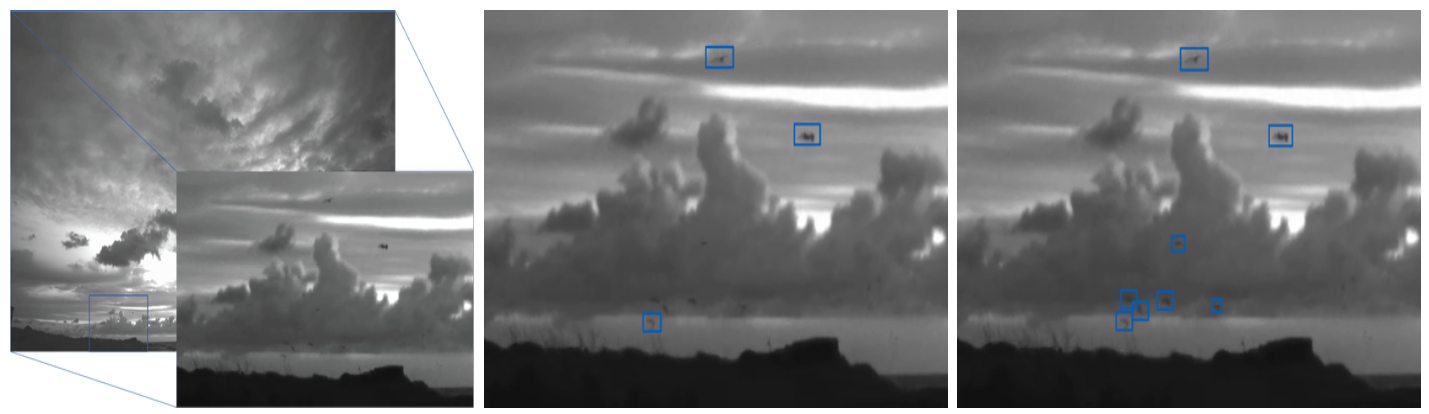
This work is part of a large effort at analyzing bird movements around wind farms. The primary motivation is to use this information to make wind farms safer to migrating birds. The following figure shows bird detections using Model 1 (middle) and Model 2 (right). Input is shown on the left. The frontal image shows a small region—blue rectangle—from the input image.
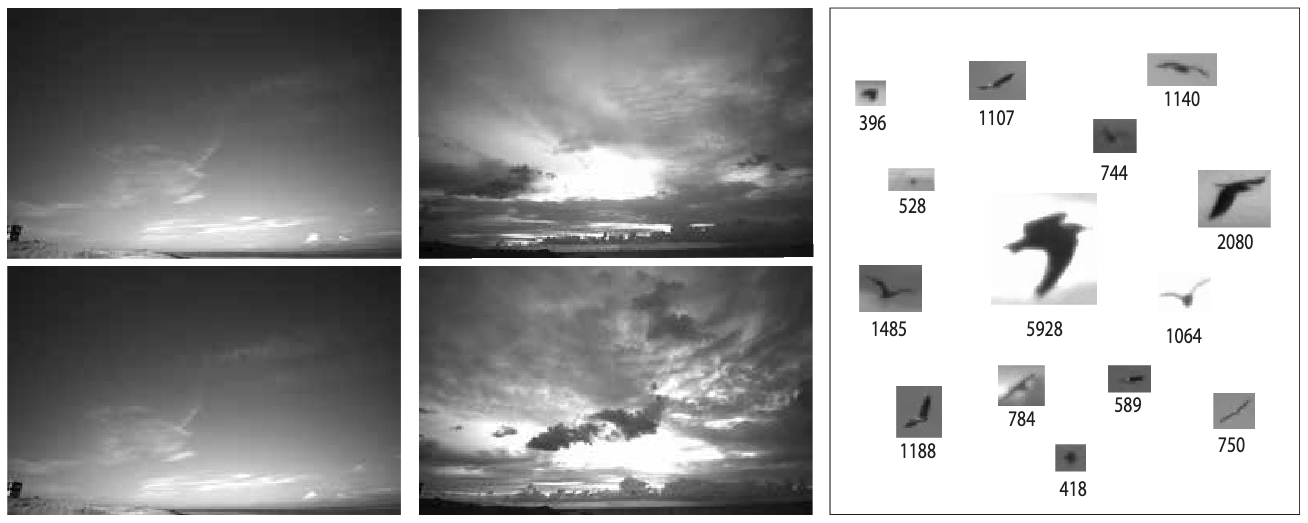
As a part of this work, we also collected two datasets: Skagen and Klim. The figure below shows frames from Skagen (left) and Klim (middle) datasets. The right image shows manually cropped birds that are used to train the bird detector. Next to each bird is its size in pixels.
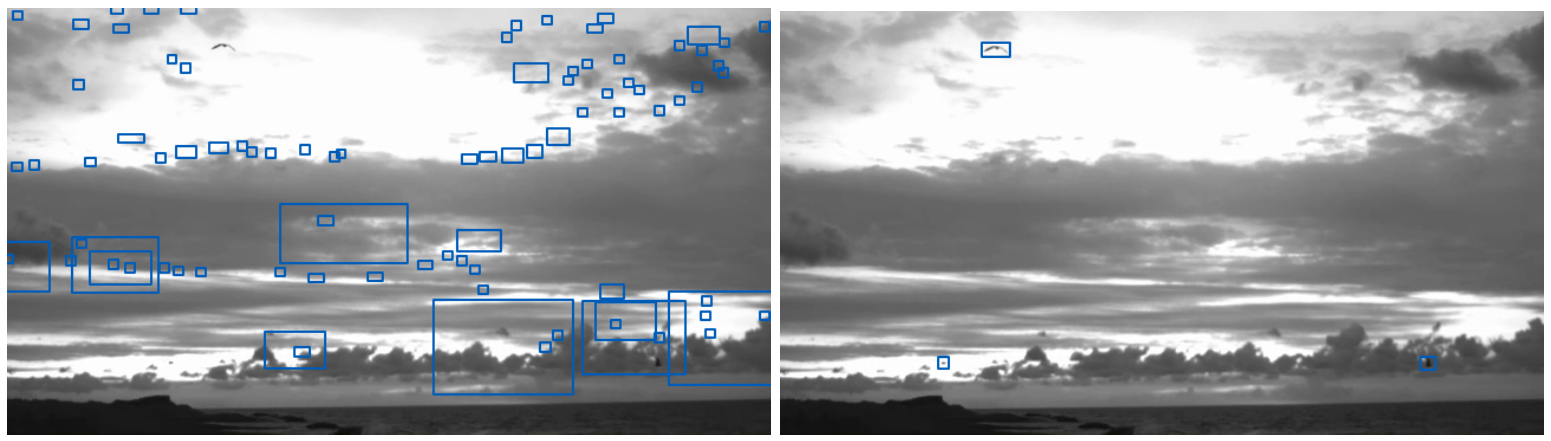
The following figure suggests that the proposed temporal boosted YOLOv4 model for bird detection exhibits better performance as compared to the background subtraction based method, especially in cluttered scenes (i.e., in the presence of clouds).
Dataset
The datasets will be available at https://github.com/STCResearchCentre/datasets.
Publication
For technical details please look at the following publications